WirelessBR
|
|
WirelessBr
é um site brasileiro, independente, sem vínculos com empresas
ou organizações, sem finalidade comercial, feito por
voluntários, para divulgação de tecnologia em telecomunicações |
|
SINCRONIZAÇÃO EM REDES DE TELECOMUNICAÇÕES
(10) |
|
Autor:
JULIAN ALEXIENCO PORTILLO |
Esta página
contém um figura grande. Aguarde a carga se a conexão estiver lenta.
3. SINCRONIZAÇÃO DA SDH
Segundo BREGNI (2002) os equipamentos da SDH podem operar sincronizados pois
possuem entradas para sinal de sincronismo e possuem os seguintes blocos
funcionais relacionados à sincronização:
-
Interface física de
temporização do equipamento síncrono (SETPI): provê a interface
apropriada para entradas/saídas de sincronismo baseadas em sinais com
taxas da PDH;
-
Fonte de temporização do
equipamento síncrono (SETS): provê os sinais internos de sincronismo do
equipamento da SDH baseados em uma entrada externa, em um oscilador
interno, ou em relógio recuperado.
3.1. Diretrizes para
sincronização
Aplicação de rede da SDH:
Tem-se uma aplicação de rede SDH quando, no mínimo, um dos sinais
tributários trafegando pela rede é um sinal STM-N podendo requerer
processamento de ponteiro de unidade administrativa (AU) e/ou unidade
tributária (TU). Dois exemplos de aplicações de rede da SDH são dados a
seguir:
-
Rede SDH compreendendo
elementos de rede com relógios internos sincronizáveis externamente;
-
Rede da SDH incluindo
elementos de rede para os quais o relógio fornecido a um sinal de saída
específico é derivado diretamente do relógio recuperado a partir do
sinal de entrada correspondente. Esta configuração é denominada “loop
timing”. É usada tipicamente em pequenas estações terminais, particular
em redes estrela, onde uma interface para referência externa de
sincronismo não é disponível, por exemplo, em redes de acesso a
assinantes.
Aplicações ponto-a-ponto da
SDH: É aquela na qual todos os sinais tributários são assíncronos ou
plesiócronos sem processamento de ponteiro de AU e TU.
A sincronização não é necessária nesta aplicação, mas deve se fornecida
assim que a rede for ampliada além de simples aplicação ponto-a-ponto.
3.2. Método de sincronização
Mestre-Escravo
A Sincronização Mestre-Escravo é baseada em uma hierarquia de relógios,
apropriada para as redes da SDH. Neste método, um nó da rede contendo um
relógio mais estável para referência, transmite a sua freqüência para os nós
cuja estabilidade seja igual ou menor que a sua. Em cada nó que recebe o
sinal de referência, o oscilador local se amarra à freqüência e à fase do
sinal de referência, e provê internamente esse novo sinal de relógio, que
pode servir de referência para outros nós abaixo na hierarquia, como mostra
a figura 7.
Figura 7: Sincronização Mestre Escravo
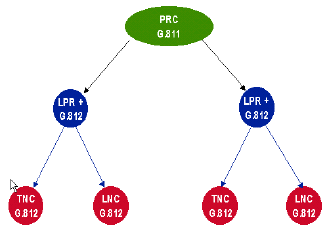
Fonte: Road show Sincronismo (2001)
Recomenda-se que a sincronização tenha como base um ou mais Relógios
Mestres, também denominado Relógio Primário de Referência, que deve prover
sinais de referência de sincronismo com precisão de longo prazo de 1x10-11 e
verificação através do Tempo Universal Coordenado.
Essa precisão é obtida a partir de padrões Césio, como o tempo de vida
desses relógios é, em média, de 3 a 5 anos, deve-se introduzir relógios
reserva para evitar degradações no relógio de referência primária.
O projeto também deve garantir que comutações e operações internas desses
relógios não causem descontinuidades de fase na saída superior a 1/8 unidade
de intervalo (UI) de 61 ns para 2,048 Mbit/s.
O Relógio Escravo é constituído basicamente por um Loop lógico de fase (PLL)
que amarra a freqüência e a fase do relógio gerado localmente à referência
oriunda do Relógio Mestre (BREGNI, 2002).
Esta nova referência é então distribuída aos nós de hierarquia inferior.
O Relógio Escravo também tem por função manter a estabilidade da freqüência
quando o sinal de referência falhar, evitando que alterações bruscas de fase
no sinal de referência sejam transferidas à saída.
Os relógios Escravos possuem quatro modos de operação, a saber:
-
Ideal:
A operação ideal reflete o desempenho do relógio quando não existir
qualquer
degradação no sinal de referência de entrada.
-
Real:
O modo real reflete o desempenho do relógio escravo considerando o
impacto
das condições reais de operação, onde estão presentes os efeitos de
jitter,
comutação de proteção, etc.
-
Autônomo (holdover):
A operação no modo autônomo reflete o desempenho do relógio escravo
quando o oscilador local perde o sinal de referência por um dado período
de tempo, utilizando técnicas de armazenamento de fase para manter sua
precisão com relação à última comparação com a referência de
sincronismo.
-
Oscilação Livre (free-running):
Diz-se que o relógio está no modo livre quando o oscilador local perde a
referência externa e não utiliza qualquer técnica de armazenamento de
fase para manter sua precisão. Somente a precisão do próprio oscilador é
que determina a estabilidade da freqüência do sinal de referência.
No método de Sincronização
Mestre Escravo, o sistema de controle dos relógios escravos seleciona a
referência de melhor qualidade. Em caso de falha da referência original é
selecionada uma alternativa.
Este esquema de controle é unilateral, quando não existem referências
alternativas, o relógio entra no modo autônomo ou no modo livre (BREGNI,
2002).
Os níveis hierárquicos para a rede de sincronização Mestre-Escravo
recomendados pelo ITU-T estão listados abaixo em ordem decrescente de
estabilidade de longo prazo:
-
Relógio Primário de
Referência (PRC);
-
Relógio Escravo (Central
Trânsito);
-
Relógio Escravo (Central
Local);
-
Relógio Escravo
(equipamento SDH).
Os Relógios Escravos localizados nos equipamentos da SDH são as próprias
funções de geração de relógios SETS. A estabilidade desses relógios no modo
livre é de 4,6 partes por milhão, essa é a maior variação de freqüência que
a SDH deve suportar sem perder o tráfego.
Os equipamentos de SDH podem ser sincronizados a partir das referências
listadas a seguir:
Sinal STM-N;
Sinal tributário de 2,048 Mbit/s;
Sinal de 2,048 Mhz;
Sinal de 2,048 Mbit/s.